What is a servo motor, and what are they used for?
A servo drive system breaks down into two main components: the servo motor and a servo drive. The servo drive converts electrical power from the connected line supply in a controlled manner into power for the motor. The servo drive consists of power electronics and control electronics for regulation, set point generation, and component monitoring.
The servo motor converts the electrical power into movement. It consists of torque generating components, the sensor for angle and feedback and, in some cases, a holding brake to maintain position at zero current. Generally, the operation of servo motors is characterized by frequent changes in speed and torque, operation at standstill to hold positions, and short-term operation with high overloads.
To understand the advantages of a servo motor, let's consider the inner workings: construction, operating characteristics, sensors, and brakes.
Servo Motor Construction
Servo motors are generally characterized by a slim line design with a high power density, low inertia, and high efficiency. Servo motors are typically designed for operation with matched servo drives from the same manufacturer.
Advantages:
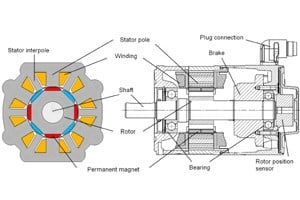
Plug connectors allow fast and error free connection of the motors. In contrast to three-phase AC motors without speed feedback, the servo motor not only has three power terminals and one earth connection, but also at least six connections for the feedback device and two connections for temperature monitoring. The large number of connections can easily lead to errors in the connection process. Plug connectors mean that connection errors are minimized and time can be saved on commissioning.
Servo motors have a sensor for angle and speed, whose signal is evaluated by the drive. This enables precise and dynamic control of the motor’s speed and position. The setting range for the speed and the achievable dynamics are considerably higher than when using a frequency inverter with a three-phase AC motor.
Servo motors are also often equipped with a brake, in particular for applications where gravity can cause the machine to move. The brake is a normally-on device which will hold the position when the power supply of the drive is switched off.
Asynchronous vs. Synchronous
Servo motors are available in both asynchronous technology (for example the Lenze MCA series) and synchronous technology (Lenze MCS series).
Asynchronous servo motors exhibit a wide range of speed with reduced torque available above the rated speed due to field weakening operation. Because of the higher mass inertia compared with synchronous servo motors, asynchronous servo motors are particularly suitable for less dynamic mechanics, for example, travel drives with toothed belts.
Synchronous servo motors have a rotor with high energy magnets. They achieve a lower inertia than asynchronous servo motors that have the same rated torque, are smaller in size, and do not require any magnetizing current. The result is a higher dynamic performance with greater acceleration.
Operating Characteristics
When paired with a servo drive, servo motors have a range of speeds and torques in which the combination can be operated. The second illustration shows an example of synchronous servo motor rated at 7.5Nm. The operating range is principally limited by the available current. It determines the upper part of the torque curve, and, in this illustration is based on a 24A servo drive.
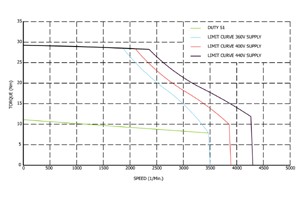
Speed-torque characteristic for synchronous servo motor rated at 7.5Nm.
The maximum speed that a synchronous motor can reach is defined by the output voltage of the drive, which is in turn dependent on the supply voltage. In this illustration there are three curves on the right hand side for 360, 400 and 440V mains voltage.
Below the maximum torque limit is a curve for thermally permissible operation. The points on this S1 curve represent the working points for continuous operation or continuous stand-by operation. If the working point of the effective torque is below this curve, operation is thermally permissible. However, in most servo motor applications, the concept of S1 continuous operation is unrealistic. Mostly, the torque profile is highly variable with peaks and periods of low torque. The calculated RMS value needs to be within the S1 limit.
Compared to the characteristics of synchronous servo motors, the asynchronous servo motor does not have a fixed speed limit (see the third diagram). The wide field weakening range of the motors means that they can be operated at speeds high above the rated speed, but with low torques. The maximum torque depends on the current output from the servo drive, similar to synchronous motors.
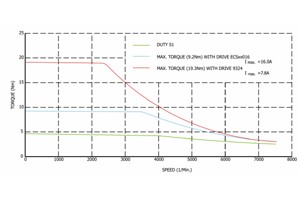
Speed-torque characteristics for asynchronous servo motor rated at 4.0Nm.
Servo Motors: An In-Depth Introduction, Part 2
Considering their advantages, construction, and operating characteristics lays the groundwork for understanding the best applications for servo motors. Shaft sensors and holding brakes also play an important role in the science of a servo motor, and provides context for their application. Check in next month for Part 2, or talk to one of our experts to discuss how a servo motor could serve your automation system today.
